HOME > 오픈소스보드/IoT > DFROBOT > DFROBOT
■ 제품필수정보
| 제조사 | DFRobot |
|---|---|
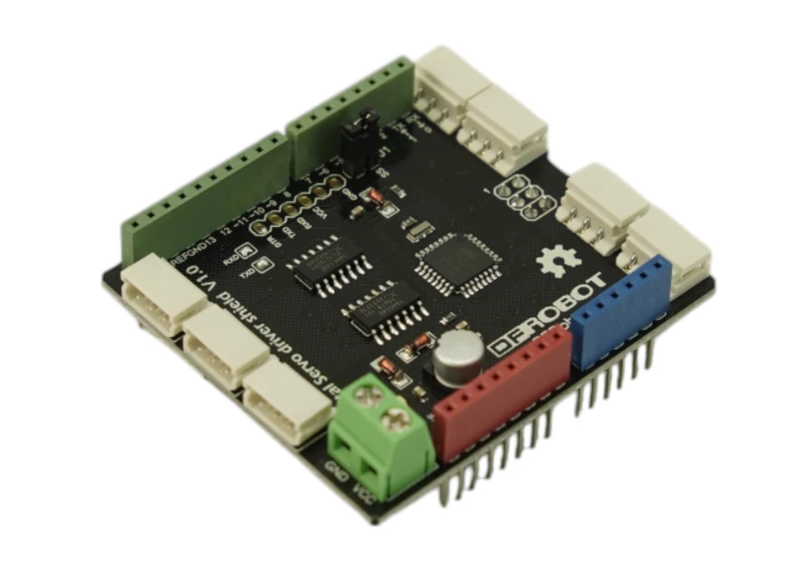
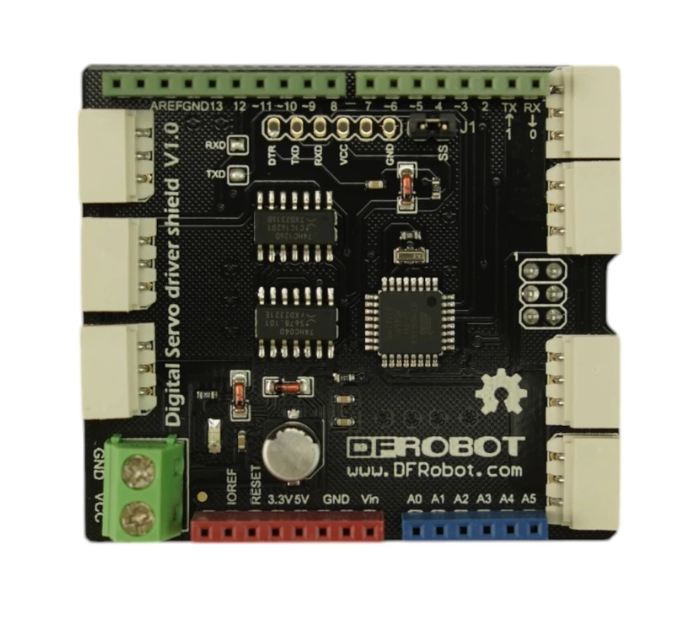
| 제조사품명 | DFRobot 아두이노 Digital Servo Shield for Dynamixel AX (DRI0027) |
| 간략설명 | DFRobot 아두이노 Digital Servo Shield for Dynamixel AX (DRI0027) |
■ 제품사양